400 128 6709

行业新闻
 发布时间:2025-07-22
发布时间:2025-07-22 点击次数:
点击次数: 本文介绍基于Paddle复现的PoseC3D模型,其以3D热图堆栈为人体骨架表示,用3D-CNN分类,较GCN方法在时空特征学习等方面更优。复现在UCF-101数据集上达87.05%的top1准确率,详述了网络结构、环境依赖、数据集、代码结构及训练测试等流程,还提及复现心得。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
人体骨架作为人类行为的一种简洁的表现形式,近年来受到越来越多的关注。许多基于骨架的动作识别方法都采用了图卷积网络(GCN)来提取人体骨架上的特征。尽管在以前的工作中取得了积极的成果,但基于GCN的方法在健壮性、互操作性和可扩展性方面受到限制。
在本文中,作者提出了一种新的基于骨架的动作识别方法PoseC3D,它依赖于3D热图堆栈而不是图形序列作为人体骨架的基本表示。与基于GCN的方法相比,PoseC3D在学习时空特征方面更有效,对姿态估计噪声更具鲁棒性,并且在跨数据集环境下具有更好的通用性。
此外,PoseC3D可以在不增加计算成本的情况下处理多人场景,其功能可以在早期融合阶段轻松与其他模式集成,这为进一步提升性能提供了巨大的设计空间。在四个具有挑战性的数据集上,PoseC3D在单独用于Keletons和与RGB模式结合使用时,持续获得优异的性能。
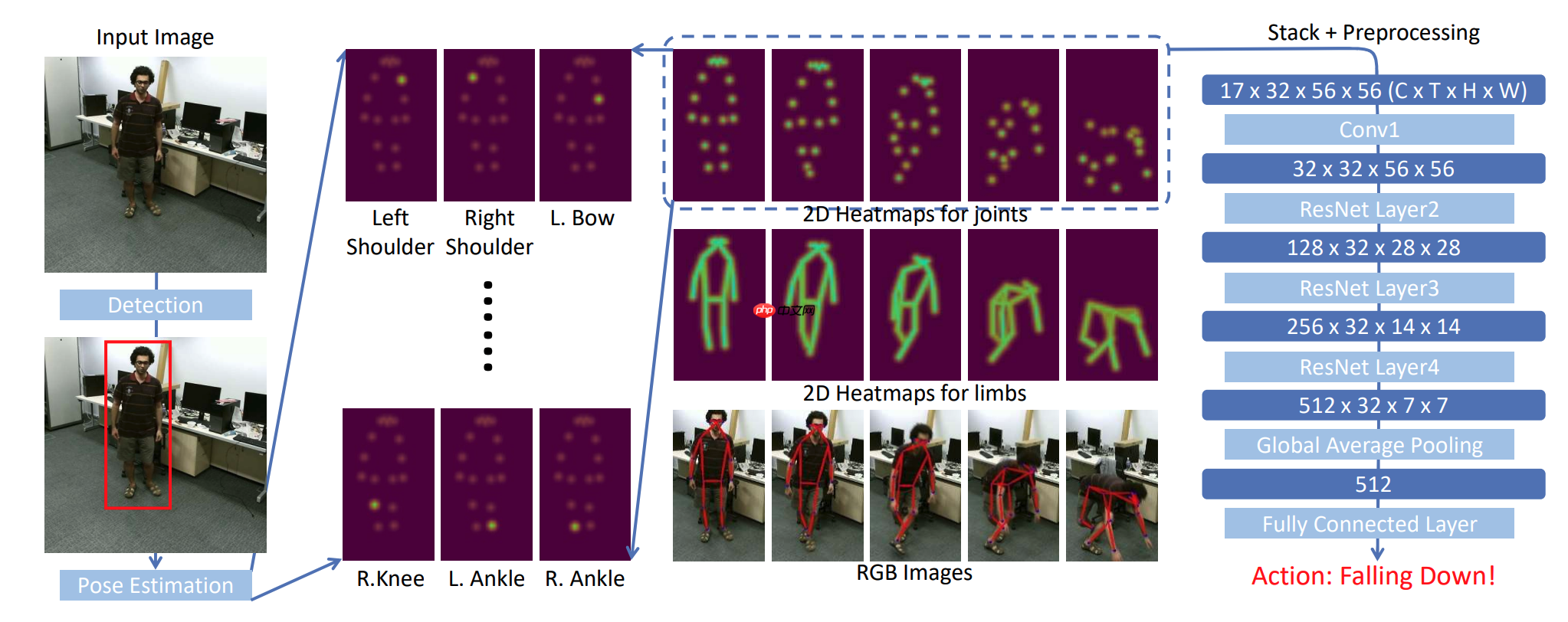
上图是网络架构,对于视频中的每一帧,首先使用两阶段姿势估计(检测+姿势估计)进行人体姿势提取。然后沿着时间维度堆叠关节或肢体的heatmap,并对生成的三维heatmap进行预处理。最后,我们使用3D-CNN对三维的heatmap进行分类。
在UCF-101数据集上spilt1的测试效果如下表。
| NetWork | epochs | opt | image_size | batch_size | dataset | top1 acc |
|---|---|---|---|---|---|---|
| PoseC3D | 12 | SGD | 56x56 | 16 | UCF-101 | 87.05% |
UCF-101以及预训练模型下载地址:
https://aistudio.baidu.com/aistudio/datasetdetail/140593
PaddlePaddle == 2.2.2
从第一节的图中可以看到,网络的主要结构由Resnet中的Layer构成,网络结构代码如下:
class ResNet3d(nn.Layer):
arch_settings = {
50: (Bottleneck3d, (3, 4, 6, 3)),
101: (Bottleneck3d, (3, 4, 23, 3)),
152: (Bottleneck3d, (3, 8, 36, 3))
}
上述代码定义了ResNet3d的网络类,以及定义了不同层数网络的配置。
def __init__(self,
depth,
pretrained,
stage_blocks=None,
pretrained2d=True,
in_channels=3,
num_stages=4,
base_channels=64,
out_indices=(3, ),
spatial_strides=(1, 2, 2, 2),
temporal_strides=(1, 1, 1, 1),
dilations=(1, 1, 1, 1),
conv1_kernel=(3, 7, 7),
conv1_stride_s=2,
conv1_stride_t=1,
pool1_stride_s=2,
pool1_stride_t=1,
with_pool1=True,
with_pool2=True,
style='pytorch',
frozen_stages=-1,
inflate=(1, 1, 1, 1),
inflate_style='3x1x1',
conv_cfg=dict(type='Conv3d'),
norm_cfg=dict(type='BN3d', requires_grad=True),
act_cfg=dict(type='ReLU', inplace=True),
norm_eval=False,
with_cp=False,
non_local=(0, 0, 0, 0),
non_local_cfg=dict(),
zero_init_residual=True,
**kwargs):
super().__init__() if depth not in self.arch_settings: raise KeyError(f'invalid depth {depth} for resnet') # 初始化网络参数
self.depth = depth
self.pretrained = pretrained
self.pretrained2d = pretrained2d
self.in_channels = in_channels
self.base_channels = base_channels
self.num_stages = num_stages assert 1 <= num_stages <= 4
self.stage_blocks = stage_blocks
self.out_indices = out_indices assert max(out_indices) < num_stages
self.spatial_strides = spatial_strides
self.temporal_strides = temporal_strides
self.dilations = dilations assert len(spatial_strides) == len(temporal_strides) == len(
dilations) == num_stages if self.stage_blocks is not None: assert len(self.stage_blocks) == num_stages # 保存卷积网络参数
self.conv1_kernel = conv1_kernel
self.conv1_stride_s = conv1_stride_s
self.conv1_stride_t = conv1_stride_t
self.pool1_stride_s = pool1_stride_s
self.pool1_stride_t = pool1_stride_t
self.with_pool1 = with_pool1
self.with_pool2 = with_pool2
self.style = style
self.frozen_stages = frozen_stages
self.stage_inflations = _ntuple(num_stages)(inflate)
self.non_local_stages = _ntuple(num_stages)(non_local)
self.inflate_style = inflate_style
self.conv_cfg = conv_cfg
self.norm_cfg = norm_cfg
self.act_cfg = act_cfg
self.norm_eval = norm_eval
self.with_cp = with_cp
self.zero_init_residual = zero_init_residual
self.block, stage_blocks = self.arch_settings[depth] if self.stage_blocks is None:
self.stage_blocks = stage_blocks[:num_stages]
self.inplanes = self.base_channels
self.non_local_cfg = non_local_cfg
上述代码初始化网络的超参数。
# 构建第一个 stem层
self._make_stem_layer()
self.res_layers = [] # 根据stage_blocks的内容构建网络。
# 这里的stage_blocks是(3, 4, 6)。
for i, num_blocks in enumerate(self.stage_blocks):
spatial_stride = spatial_strides[i]
temporal_stride = temporal_strides[i]
dilation = dilations[i]
planes = self.base_channels * 2**i
res_layer = self.make_res_layer(
self.block,
self.inplanes,
planes,
num_blocks,
spatial_stride=spatial_stride,
temporal_stride=temporal_stride,
dilation=dilation,
style=self.style,
norm_cfg=self.norm_cfg,
conv_cfg=self.conv_cfg,
act_cfg=self.act_cfg,
non_local=self.non_local_stages[i],
non_local_cfg=self.non_local_cfg,
inflate=self.stage_inflations[i],
inflate_style=self.inflate_style,
with_cp=with_cp,
**kwargs)
self.inplanes = planes * self.block.expansion
layer_name = f'layer{i + 1}'
self.add_sublayer(layer_name, res_layer)
self.res_layers.append(layer_name)
self.feat_dim = self.block.expansion * self.base_channels * 2**( len(self.stage_blocks) - 1)
上述为构建网络的主要的代码,首先构建一个stem层,然后根据stage_blocks的内容,使用make_res_layer方法构建网络。
def make_res_layer(block,
inplanes,
planes,
blocks, spatial_stride=1, temporal_stride=1, dilation=1, style='pytorch', inflate=1, inflate_style='3x1x1', non_local=0, non_local_cfg=dict(), norm_cfg=None, act_cfg=None, conv_cfg=None, with_cp=False,
**kwargs):
inflate = inflate if not isinstance(inflate,
int) else (inflate, ) * blocks
non_local = non_local if not isinstance(
non_local, int) else (non_local, ) * blocks
assert len(inflate) == blocks and len(non_local) == blocks
downsample = None
# 判断是否需要进行下采样。当输入的通道和输出通道不相等,则根据planes * block.expansion缩减通道数。 if spatial_stride != 1 or inplanes != planes * block.expansion:
downsample = ConvBNLayer( in_channels=inplanes, out_channels=planes * block.expansion, kernel_size=1,
stride=(temporal_stride, spatial_stride, spatial_stride), bias=False, act=None
)
上述代码为make_res_layer方法,其中包含判断block是否需要进行下采样。当输入的通道和输出通道不相等,则根据planes * block.expansion缩减通道数。在block模块中会对通道数进行缩减。
layers = []
layers.append(
block(
inplanes,
planes, spatial_stride=spatial_stride, temporal_stride=temporal_stride, dilation=dilation, downsample=downsample,  style=style,
inflate=(inflate[0] == 1), inflate_style=inflate_style,
non_local=(non_local[0] == 1), non_local_cfg=non_local_cfg, norm_cfg=norm_cfg, conv_cfg=conv_cfg, act_cfg=act_cfg, with_cp=with_cp,
**kwargs))
inplanes = planes * block.expansion
style=style,
inflate=(inflate[0] == 1), inflate_style=inflate_style,
non_local=(non_local[0] == 1), non_local_cfg=non_local_cfg, norm_cfg=norm_cfg, conv_cfg=conv_cfg, act_cfg=act_cfg, with_cp=with_cp,
**kwargs))
inplanes = planes * block.expansion
构建网络,downsample作为参数传递进去。
for i in range(1, blocks):
layers.append(
block(
inplanes,
planes, spatial_stride=1, temporal_stride=1, dilation=dilation, style=style,
inflate=(inflate[i] == 1), inflate_style=inflate_style,
non_local=(non_local[i] == 1), non_local_cfg=non_local_cfg, norm_cfg=norm_cfg, conv_cfg=conv_cfg, act_cfg=act_cfg, with_cp=with_cp,
**kwargs))
return nn.Sequential(*layers)
上述根据blocks中的数量构建网络,这里的block为Bottleneck3d层。主要是用来构建一个在通道数上类似瓶颈的一个层,与ResNet系列网络一致。
class ConvBNLayer(nn.Layer):
def __init__(
self,
in_channels,
out_channels,
kernel_size, padding=0, stride=1, dilation=1, groups=1, act=None, bias=None,
):
super(ConvBNLayer, self).__init__()
self._conv = nn.Conv3D( in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size, stride=stride, padding=padding, dilation=dilation, groups=groups, bias_attr=bias)
self._batch_norm = nn.BatchNorm3D(out_channels, momentum=0.1)
self.act = act if act is not None:
self._act_op = nn.ReLU()
上述代码为网络的卷积的基本单元,通过该方法可以构建一个Conv3D+BN+Relu的结构。该结构也是Bottleneck3d模块的重要组成部分。
%cd /home/aistudio/PaddlePoseC3D !python train.py --dataset_root ../data/data140593/ucf101.pkl \ --pretrained ../data/data140593/res3d_k400.pdparams --max_epochs 12 \ --batch_size 16 --log_iters 100
dataset_root: 训练集路径
pretrained: 预训练模型路径
max_epochs: 最大epoch数量
batch_size: 批次大小
使用最优模型进行评估.
最优模型下载地址:
 简小派
简小派
简小派是一款AI原生求职工具,通过简历优化、岗位匹配、项目生成、模拟面试与智能投递,全链路提升求职成功率,帮助普通人更快拿到更好的 offer。
 123
查看详情
123
查看详情

链接: https://pan.baidu.com/s/1J9_X_CNkXQbhBhj-xHHBDw
提取码: uq9m
In [ ]!python -u test.py --dataset_root ucf101.pkl --pretrained best_model/model.pdparams
dataset_root: 训练集路径
pretrained: 预训练模型路径
输入文件v_BaseballPitch_g07_c01.pkl的视频如下图所示,同时可视化v_BaseballPitch_g07_c01.pkl文件。通过predict.py可预测出该文件的所属分类。
In [3]%cd /home/aistudio/PaddlePoseC3D !python predict.py --input_file v_BaseballPitch_g07_c01.pkl \ --pretrained best_model/model.pdparams
/home/aistudio/PaddlePoseC3D /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/setuptools/depends.py:2: DeprecationWarning: the imp module is deprecated in f*our of importlib; see the module's documentation for alternative uses import imp Loading pretrained model from best_model/model.pdparams There are 217/217 variables loaded into Recognizer3D. File v_BaseballPitch_g07_c01 is class BaseballPitch

参数说明:
input_file: 输入文件,按照ucf-101.pkl格式。可以使用test_tipc/data中的predict_example.pkl数据进行测试。
pretrained: 训练好的模型
模型导出可执行以下命令:
In [ ]!python export_model.py --model_path best_model.pdparams --s*e_dir ./output/
参数说明:
model_path: 模型路径
s*e_dir: 输出图片保存路径
可使用以下命令进行模型推理。该脚本依赖auto_log, 请参考下面TIPC部分先安装auto_log。infer命令运行如下:
In [ ]!python infer.py --use_gpu=False --enable_mkldnn=False \ --cpu_threads=2 --model_file=output/model.pdmodel --batch_size=2 \ --input_file=validation/BSD300/test --enable_benchmark=True --precision=fp32 \ --params_file=output/model.pdiparams --s*e_dir output/inference_img
参数说明:
use_gpu:是否使用GPU
enable_mkldnn:是否使用mkldnn
cpu_threads: cpu线程数
model_file: 模型路径
batch_size: 批次大小
input_file: 输入文件路径
enable_benchmark: 是否开启benchmark
precision: 运算精度
params_file: 模型权重文件,由export_model.py脚本导出。
s*e_dir: 保存推理预测图片的路径
该部分依赖auto_log,需要进行安装,安装方式如下:
auto_log的详细介绍参考https://github.com/LDOUBLEV/AutoLog。
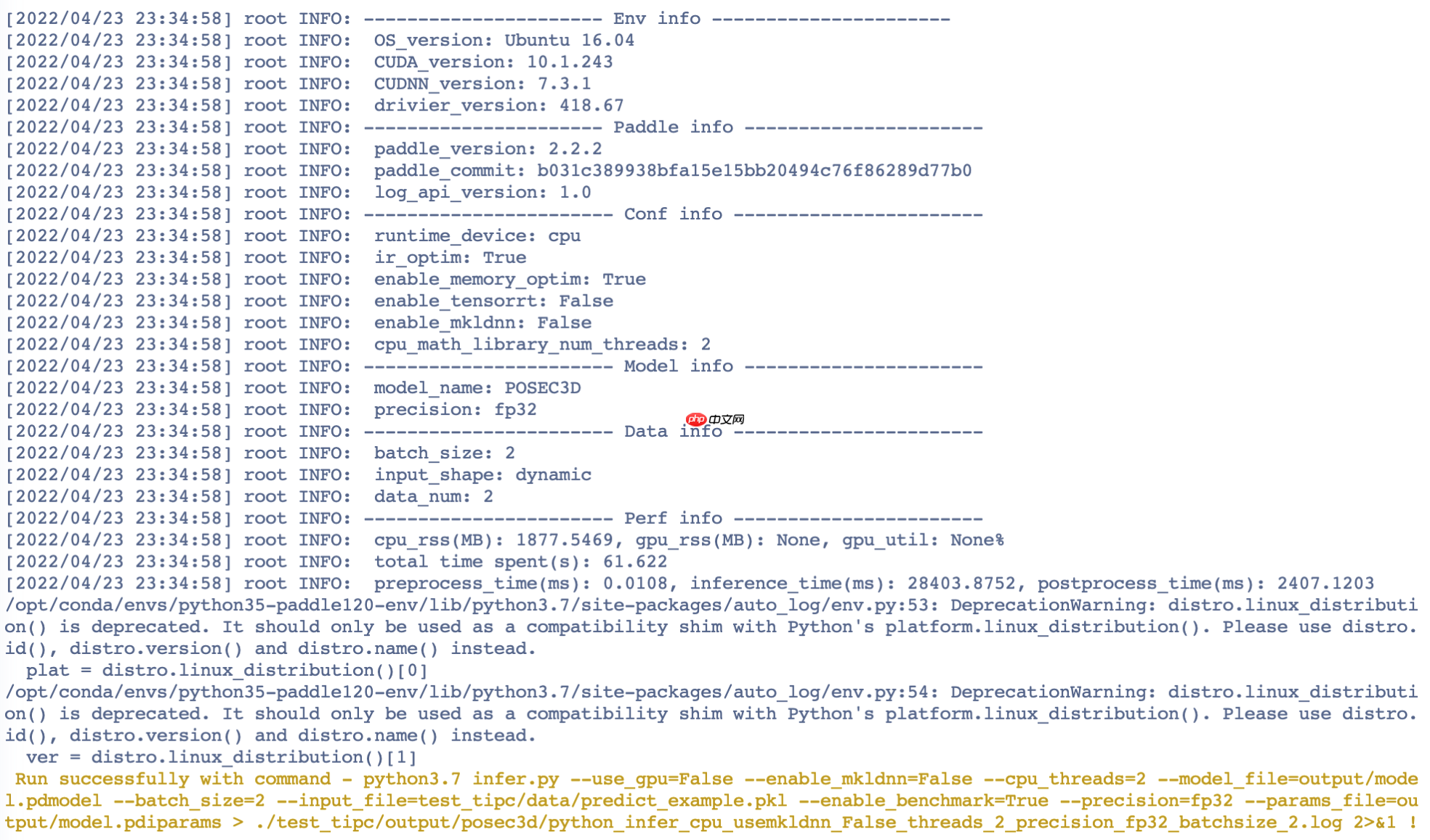
In [ ]%cd /home/aistudio/ !git clone https://gitee.com/Double_V/AutoLog !cd AutoLog/ !pip3 install -r requirements.txt !python3 setup.py bdist_wheel !pip3 install ./dist/auto_log-1.2.0-py3-none-any.whl !bash test_tipc/prepare.sh test_tipc/configs/posec3d/train_infer_python.txt 'lite_train_lite_infer'!bash test_tipc/test_train_inference_python.sh test_tipc/configs/posec3d/train_infer_python.txt 'lite_train_lite_infer'
测试结果如截图所示:
PaddlePoseC3D ├── README.md # 使用说明 ├── datasets # 数据集包 │ ├── __init__.py │ ├── base.py #数据集基类 │ ├── file_client.py # 文件处理类 │ ├── pipelines │ │ └── transforms.py # 数据增强类 │ ├── pose_dataset.py # 数据集类 │ ├── dataset_wrappers.py # 数据集类 │ └── utils.py #数据集工具类 ├── models │ ├── __init__.py │ ├── base.py # 模型基类 │ ├── resnet3d.py # backbone │ ├── resnet3d_slowfast.py # backbone │ └── resnet3d_slowonly.py # backbone │ ├── i3d_head.py # c3d模型头部实现 │ └── recognizer3d.py # 识别模型框架 ├── progress_bar.py #进度条工具 ├── test.py # 评估程序 ├── test_tipc # TIPC脚本 │ ├── README.md │ ├── common_func.sh # 通用脚本程序 │ ├── configs │ │ └── posec3d │ │ └── train_infer_python.txt # 单机单卡配置 │ ├── data │ │ ├── example.npy # 推理用样例数据 │ │ └── mini_ucf.zip # 训练用小规模数据集 │ ├── output │ ├── prepare.sh # 数据准备脚本 │ └── test_train_inference_python.sh # 训练推理测试脚本 ├── timer.py # 时间工具类 ├── train.log # 训练日志 ├── test.log # 测试日志 ├── train.py # 训练脚本 └── utils.py # 训练工具包
| 信息 | 描述 |
|---|---|
| 模型名称 | PoseC3D |
| 框架版本 | PaddlePaddle==2.2.2 |
| 应用场景 | 骨骼识别 |
在之前的复现赛中复现过C3D,这次看到了PoseC3D的复现就参加了。复用了部分之前部分C3D的代码,所以这篇论文代码完成的速度比较快。参考repo使用的是8卡,我使用的Notebook的1卡V100环境,所以每个batch是参考repo的1/8,所以学习率也调整为原来的1/8。最终精度为87.05%跟源repo的87%基本一致,也是符合预期的。最后感谢飞桨举办本次比赛,也感谢AI Stuido提供算力支持。
以上就是骨骼点动作识别-基于Paddle复现PoseC3D的详细内容,更多请关注其它相关文章!
# python
# git
# 芜湖县网站推广价格优化
# 点亮工厂seo
# 第一个
# 热图
# 的是
# 官网
# 最优
# 所示
# 构建一个
# 下载地址
# 中文网
# 工具
# ai
# red
# igs
# udio
# whee
# fig
# type
# 一言
# 石家庄网站建设顾问
# 度假区营销推广方案策划
# 宁德市短视频推广营销公司
# 濮阳关键词排名公司
# 温州网站内容优化
# 天门房地产网站推广公司
# 无锡内容seo推广
# 阜新首页seo优化
相关栏目:
【
行业新闻62819 】
【
科技资讯67470 】
相关推荐:
新华三集团总裁兼首席执行官于英涛:人工智能时代需要想象力,更需要精耕务实
Vision Pro头显重磅发布;苹果收购AR厂商Mira
五个IntelliJ IDEA插件,高效编写代码
人工智能:解决劳动力短缺的关键策略
2025 WAIC|美团无人机发布第四代新机型
Meta发布语音AI模型 Voicebox 助虚拟助手与NPC对话
Goodnotes 6推出,带来多项全新AI功能,让电子笔记更智能
AI大模型产品集体奔赴高考考场,教育赛道的讯飞星火能赢吗?
1分钟做出苹果Vision Pro「官网」?上班8小时搞出480个网页,同事被卷疯了
Unity 内测 Safe Voice 服务,利用 AI 自动识别玩家不当聊天内容
创新全场景清洁方案!海尔商用机器人首发上市
华为将于 7 月发布面向 AI 大模型的新款存储产品
金山办公宣布与英伟达团队合作,加速WPS AI服务
李开复官宣新公司「零一万物」,进军 AI 2.0
时隔 4 年:谷歌更新安卓机器人 LOGO,形象更立体
放弃自动驾驶,也是一种和解
亚马逊确认今年不会举办 re:MARS 机器人和人工智能大会
OpenAI限制网络爬虫访问以保护数据免被用于AI模型训练
飒智智能机器人核心技术与应用论坛暨一体化控制器发布会成功举办
赋能选题探索:AI助手在经济学专业中的应用指南
WHEE安装教程
马斯克的幽默“现实”:AR眼镜与20美元“增强现实”哪个真实?
字节团队提出猞猁Lynx模型:多模态LLMs理解认知生成类榜单SoTA
Adobe旗下Illustrator引入生成式AI工具Firefly
Unity发布Sentis和Muse AI工具,助力创作游戏和3D内容
小艺主导智慧交互升级,借助AI大模型增强能力
Yann LeCun团队新研究成果:对自监督学习逆向工程,原来聚类是这样实现的
美图吴欣鸿:希望更多人用上AI时代的影像生产力工具
Meta 为打造元宇宙不惜下血本:VR 开发者年薪高达百万美元
水路两栖艇、消防灭火机器人……这个展览“黑科技”抢眼
编程版GPT狂飙30星,AutoGPT危险了!
最大助力35公斤 外骨骼机器人或在养老、医疗领域“大展身手”
中美陷入囚徒困境,人工智能变得不可控?可参考核不扩散条约规范
第四范式「式说」大模型入选《2025年通用人工智能创新应用案例集》
2025 年开发者必须知道的六个 AI 工具
为了避免人工智能可能带来的灾难,我们要向核安全学习
中国移动主导创立元宇宙产业联盟,包括科大讯飞、芒果TV等在内,共24家成员
Meta Quest订阅服务每月7.99美元畅玩两款VR游戏应用
阿里云全面支持Llama2训练部署,助力企业快速构建自有大型模型
构建AI绘画网站的方法:使用API接口和调用步骤
磐镭发布全新 GeForce RTX 4080 ARMOUR 显卡,售价为 9499 元
Win11 的画图应用将包含 Windows Copilot 的 AI 工具整合
田渊栋新作:打开1层Transformer黑盒,注意力机制没那么神秘
“一般智力”与工艺学批判是认识AI的重要入口 | 社会科学报
生成式人工智能进入产业应用!但再“聪明”仍是工具,最终目的是服务于人
企业软件行业更将被AI全面重构!Moka李国兴:未来优秀组织和个人将一定是善于使用AI生产力的
“黑科技”亮相大湾区轨交论坛 智慧交通迈向“强AI”
Stability AI 推出文生图模型 SDXL0.9,GPU要求下探至消费级水平
探展WAIC | 第四范式“式说”聚焦toB大模型,布局生成式AI重构企业软件
“无人驾驶船”将首次亮相世界人工智能大会,下半年或开进上海迪士尼
 当前位置:
当前位置:  style=style,
inflate=(inflate[0] == 1), inflate_style=inflate_style,
non_local=(non_local[0] == 1), non_local_cfg=non_local_cfg, norm_cfg=norm_cfg, conv_cfg=conv_cfg, act_cfg=act_cfg, with_cp=with_cp,
**kwargs))
inplanes = planes * block.expansion
style=style,
inflate=(inflate[0] == 1), inflate_style=inflate_style,
non_local=(non_local[0] == 1), non_local_cfg=non_local_cfg, norm_cfg=norm_cfg, conv_cfg=conv_cfg, act_cfg=act_cfg, with_cp=with_cp,
**kwargs))
inplanes = planes * block.expansion 上一篇:
上一篇: 返回列表
返回列表