400 128 6709

行业新闻
 发布时间:2023-07-18
发布时间:2023-07-18 点击次数:
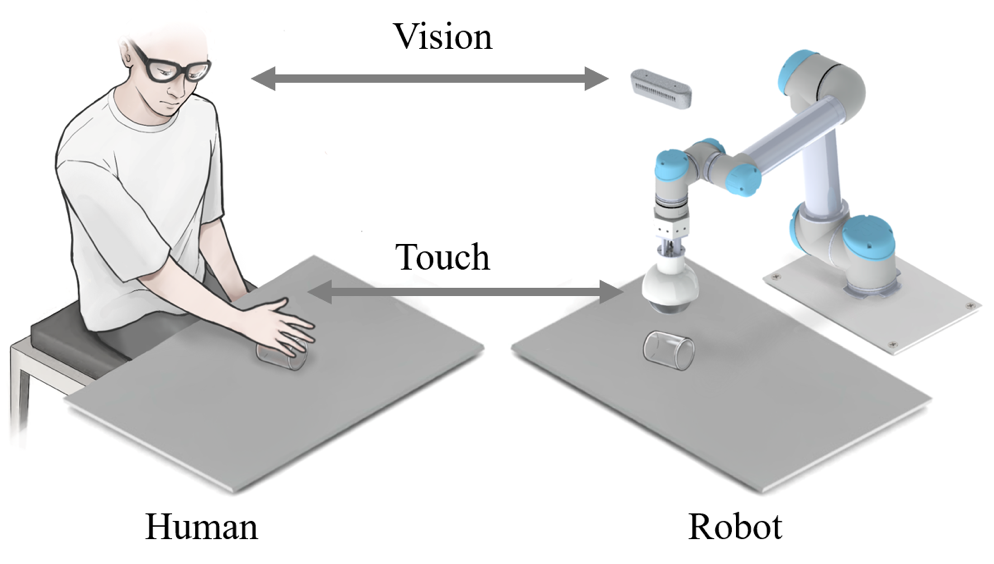
点击次数: 复杂环境下透明物体的感知和抓取是机器人领域和计算机视觉领域公认的难题。近日,来自清华大学深圳国际研究生院的团队与合作者提出了一种视 - 触融合的透明物体抓取框架,该框架基于 RGB 相机和带有触觉感知能力的机械爪 TaTa, 并通过 sim2real 的方式来实现透明物体的抓取位置检测。该框架不仅可以解决玻璃碎片等不规则透明物体的抓取,还可以实现重叠、堆叠、高低不平、沙堆甚至高动态水下透明物体抓取问题。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
 图片
图片
透明物体由于其美观、简约等特点而在生活中广泛应用。比如厨房、商店、工厂都能见到他们的身影。虽然透明物体很常见,但对于机器人而言,透明物体的抓取却是一个非常困难的问题。其主要原因有三个:
 图片
图片
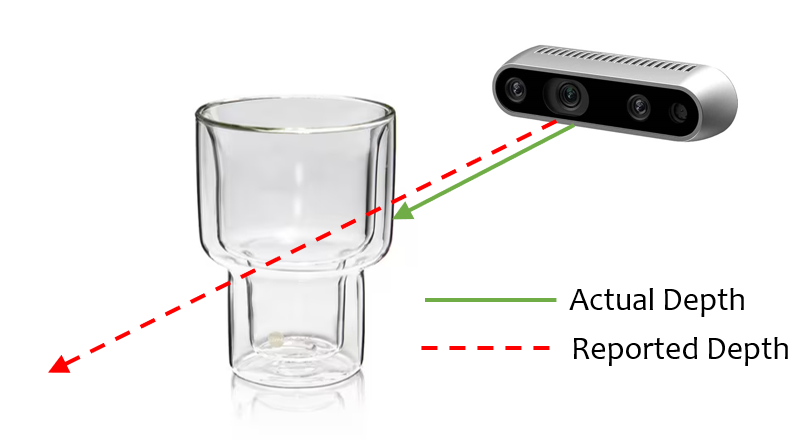
1、没有自己的纹理属性。透明物体表面的信息随着所在环境的变化而变化,所产生的纹理大都是由于光线折射、反射造成的,这就给透明物体的检测带来了很大的困难。
2、透明数据集的标注相比于普通物体标注具有更大的难度。在实际场景中,人类有时也不容易区分玻璃等透明物体,更不用说对透明物体的图像进行标注。
3、透明物体表面光滑,即使抓取位置存在较小偏差也可能导致抓取任务的失败。
因此,如何利用尽可能少的成本来解决各种复杂场景下的透明物体抓取问题已经成为了透明物体研究领域非常重要的问题。近日,来自清华大学深圳国际研究生院的智能感知与机器人团队提出了一个基于视触融合的透明物体抓取框架,该框架模仿了人在低可见度情况下抓取物体的动作,并利用视触融合来实现透明物体的检测和抓取。该方法不仅具有极高的抓取成功率,还可以适应各种复杂场景下的透明物体抓取。
 图片
图片
请查看如下论文链接:https://ieeexplore.ieee.org/document/10175024
论文通讯作者、清华大学深圳国际研究生院丁文伯副教授表示:「机器人在家庭服务领域展现出了巨大的应用价值,但当前的机器人大多聚焦于某一单一领域,通用型机器人抓取模型的提出将会对机器人技术的推广和应用带来巨大的推动作用。虽然我们是以透明物体为研究对象,但该框架可以很轻松的推广到生活中常见物体的抓取任务中。」
论文通讯作者、清华大学深圳国际研究生院刘厚德研究员表示:「家庭场景中的非结构化环境对机器人的实际应用带来了极大的挑战,我们将视觉与触觉进行融合感知,进一步模拟了人类与外界交互时的感知过程,为复杂场景下机器人应用的稳定性提供了多方面的保障。除了将视觉与触觉的融合,我们提出的框架也可同样推广到听觉等更多的模态。」
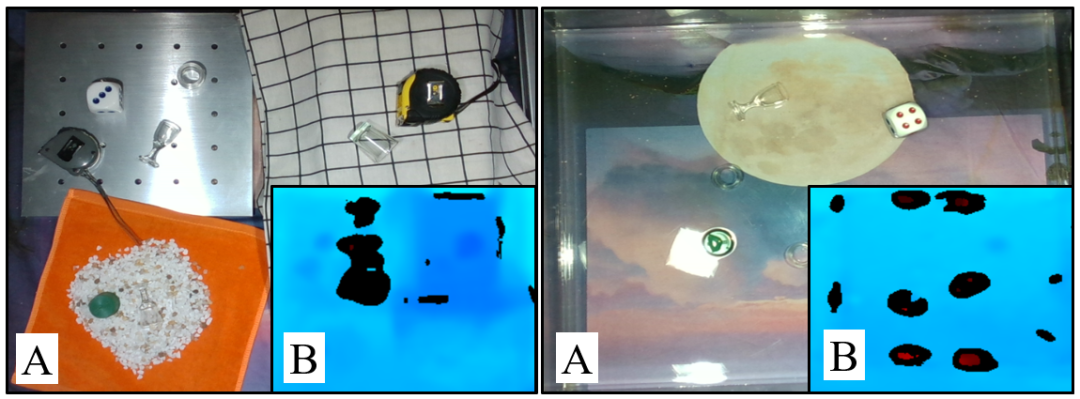
透明物体的抓取是一项具有挑战性的任务,在抓取过程中除了需要检测物体的位置外,还应考虑抓取位置和角度。目前对于透明物体的抓取,大部分的工作是在具有简单背景的平面上进行的,但在实际生活中,大部分的场景都不会像我们的实验环境那么理想。一些特殊场景,比如玻璃碎片、堆积、重叠、起伏、沙子和水下场景,都是比较有挑战性的。
 图片
图片
 图片
图片
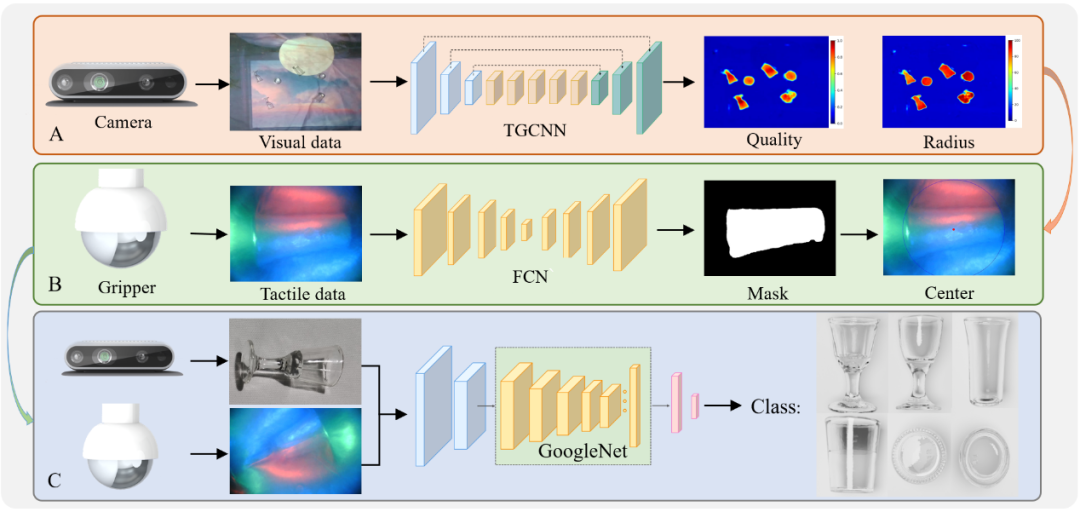
抓取算法设计如图所示,为了实现透明物体的抓取,我们分别提出了透明物体抓取位置检测算法、触觉信息提取算法和视 - 触融合分类算法。为了降低数据集的标注成本,我们采用 Blender 制作了一个多背景透明物体抓取合成数据集 SimTrans12K,其中包含 12000 幅合成图像和 160 幅真实图像。除了数据集,我们还针对透明物体的独特的光学属性提出了一种 Gaussian-Mask 标注方法。由于我们采用 Jamming gripper 作为执行器,我们为其提出了一个专门的抓取网络 TGCNN,该网络在合成数据集训练之后就可以得到不错的检测效果。
抓取框架
 网易人工智能
网易人工智能
网易数帆多媒体智能生产力平台
 233
查看详情
233
查看详情

我们将上述算法进行了整合,以完成不同场景下的透明物体抓取,这构成了我们视触融合框架的上层抓取策略。我们将一个抓取任务分解为三个子任务,即物体分类、抓取位置检测和抓取高度检测。每个子任务都可以由视觉、触觉或视触融合来完成。
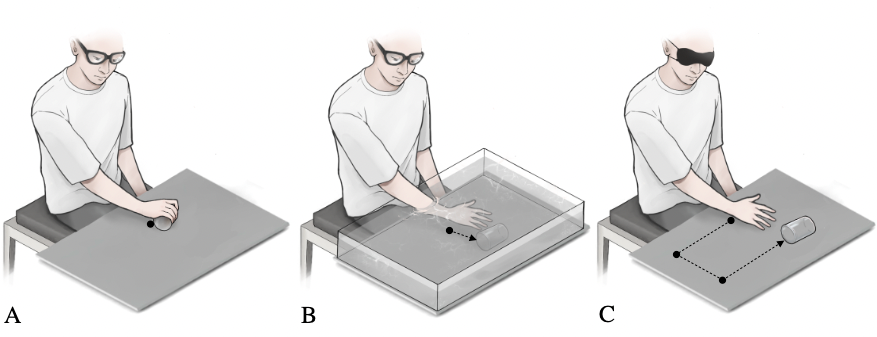
与人类抓取时的行为类似,当视觉可以直接获得物体的精确位置时,我们可以控制手直接到达物体并完成抓取,如下图(A)所示。当视觉不能准确获得物体的位置信息时,在利用视觉估计物体的位置之后,我们会用手部的触觉感知功能慢慢调整抓取位置,直到接触到物体并达到合适的抓取位置,如下图 (B) 所示。对于视觉受限情况下的物体抓取,如下图 (C) 所示,我们将利用手部丰富的触觉神经在目标可能存在的范围内进行搜索,直到与物体发生接触,这虽然效率很低,但却是解决这些特殊场景下物体抓取的有效方法。
 图片
图片
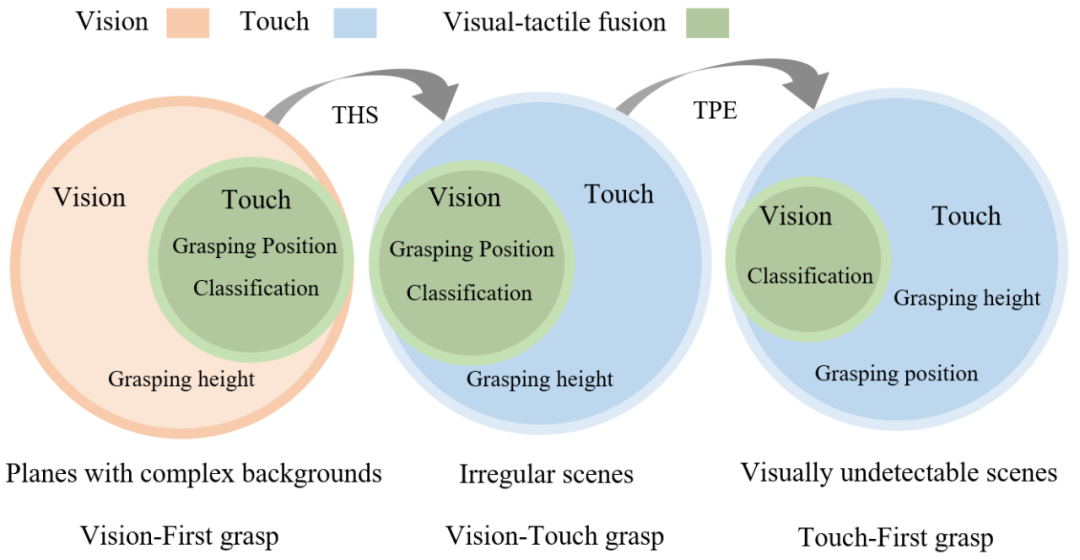
受人类抓取策略的启发,我们将透明物体的抓取任务分为三种类型:具有复杂背景的平面、不规则场景和视觉无法检测的场景,如下图所示。在第一种类型中,视觉发挥着关键性的作用,我们将这种场景下的抓取方式定义为视觉优先的抓取方法。在第二种类型中,视觉和触觉可以协同工作,我们将这种场景下的抓取方式定义为视觉 - 触觉抓取。而在最后一种类型中,视觉可能失效,触觉在任务中成为主导,我们将这种场景下的抓取方式定义触觉优先的抓取方法。
 图片
图片
视觉优先的抓取方法流程如下图所示,首先利用 TGCNN 获取抓取位置和高度,之后利用触觉信息抓取位置校准,最后利用视 - 触融合算法进行分类。视 - 触觉抓取则是在之前的基础上加入了 THS module,该模块可以利用触觉来获取物体的高度。触觉优先的抓取方法又 加入了 TPE modul,该模块可以利用触觉来获取透明物体的位置。
加入了 TPE modul,该模块可以利用触觉来获取透明物体的位置。
为了验证我们提出框架及算法的有效性,我们进行了大量的验证实验。
首先,为了测试我们提出的透明物体数据集、注释方法和抓取位置检测网络的有效性,我们进行了合成数据检测实验和不同背景和亮度下的透明物体抓取位置检测实验。其次,为了验证视觉 - 触觉融合抓取框架的有效性,我们设计了透明物体分类抓取实验和透明碎片抓取实验。第三,我们设计了在不规则和视觉受限的场景中的透明物体抓取实验,以测试加入 THS 模块和 TPE 模块后框架的有效性。
为了解决检测、抓取和分类透明物体的挑战性问题,该研究提出了一个基于合成数据集的视觉 - 触觉融合框架。首先,使用 Blender 模拟引擎来渲染合成数据集,而不是手动注释的数据集。
此外,使用 Gaussian-Mask 代替了传统的二进制标注法,使抓取位置的生成更加准确。为了实现对透明物体的抓取位置检测,作者提出了一种名为 TGCNN 的算法,并进行了多次对比实验,结果表明,即使只用合成数据集进行训练,该算法也能在不同的背景和照明条件下实现良好的检测。
考虑到视觉检测的局限性造成的抓取困难,该研究提出了一种与软抓手 TaTa 相结合的触觉校准方法,通过用触觉信息调整抓取位置来提高抓取成功率。与纯视觉抓取相比,该方法提高了 36.7%的抓取成功率。
为了解决复杂场景中透明物体的分类问题,该研究提出了一种基于视觉 - 触觉融合的透明物体分类方法,该方法与仅基于视觉的分类相比,准确率提高了 39.1%。
此外,为了实现在不规则和视觉无法检测的场景中的透明物体抓取,该研究提出了 THS 和 TPE 模块,它们可以弥补在没有视觉信息的情况下的透明物体抓取问题。研究者系统地设计了大量的实验,验证了所提出的框架在各种叠加、重叠、起伏、沙地、水下场景等复杂场景中的有效性。该研究认为,所提出的框架还可以应用于低能见度环境下的物体检测,如烟雾和浑浊的水下,触觉感知可以弥补视觉检测的不足,并通过视觉 - 触觉融合提高分类精度。

视触融合透明物体抓取项目的指导老师是丁文伯,他目前在清华大学深圳国际研究生院担任副教授,领导智能感知与机器人研究小组。他的研究兴趣主要包括信号处理、机器学习、可穿戴设备、柔性人机交互与机器感知。此前他本科和博士毕业于清华大学的电子工程系,并在佐治亚理工学院担任博士后,师从王中林院士。他曾获清华大学特等奖金、第 47 届日内瓦国际发明展金奖、IEEE Scott Helt 纪念奖、中国电子学会自然科学二等奖等众多奖项,已在 Nature Communications、Science Advances、Energy and Environmental Science、Advanced Energy Materials、IEEE TRO/RAL 等领域权威期刊发表论文 70 余篇,谷歌学术引用 6000 余次,授权中国和美国专利 10 余项。担任国际信号处理权威期刊 Digital Signal Processing 的副编辑、IEEE JSTSP 机器人感知专刊的首席客座编辑,以及 IEEE 信号处理协会 Applied Signal Processing Systems Technical Committee Member。
课题组主页:http://ssr-group.net/。

从左到右: Shoujie Li,Haixin Yu,Houde Liu
论文的共同一作分别是 Shoujie Li (清华大学博士生在读),Haixin Yu (清华大学硕士生在读),通讯作者为 Wenbo Ding、Houde Liu,其他作者还包括 Linqi Ye (上海大学)、 Chongkun Xia (清华大学)、Xueqian Wang (清华大学)、 Xiao-Ping Zhang (清华大学)。其中,Shoujie Li 主要研究方向为机器人抓取、触觉感知以及深度学习,以第一作者在 Soft Robotics、TRO、RAL、ICRA、IROS 等机器人和控制权威期刊和会议发表论文多篇,授权发明专利 10 余项,获省部级竞赛奖励 10 项,相关研究成果以第一作者入选 “ICRA 2025 Outstanding Mechanisms and Design Paper Finalists”,曾获清华大学未来学者奖学金、国家奖学金等荣誉。
以上就是能抓取玻璃碎片、水下透明物,清华提出通用型透明物体抓取框架,成功率极高的详细内容,更多请关注其它相关文章!
# 如下图
# 网站seo优化师
# 广告营销推广文案朋友圈
# 洛龙区seo招聘
# 汕头市b2b全网营销推广代理商
# 龙江网站建设流程
# 江西省网站推广优化
# 邢台区域seo推广公司
# 营销推广照片
# 惠州网站建设方案项目书
# 北京网站优化营商环境
# 深圳
# ai
# 网易
# 开源
# 所示
# 极高
# 清华
# 提出了
# 清华大学
# 水下
# design
# 机器人
相关栏目:
【
行业新闻62819 】
【
科技资讯67470 】
相关推荐:
腾讯AI首次模拟拼接三星堆文物,工作取得阶段性的成果
“痴迷”元宇宙,魔珐科技想做什么?
AIGC浪潮下,联想集团再加码计算与人工智能
人工智能自己玩自己
甲骨文与Cohere合作为企业提供生成式人工智能服务
广州团建公司方案 | 绝密飞行 → X-PLANE无人机团建主题团建
特斯拉人形机器人将于 7 月亮相上海 2025 世界人工智能大会
挤爆服务器,北大法律大模型ChatLaw火了:直接告诉你张三怎么判
Moka AI产品后观察:HR SaaS迈进AGI时代
测试框架-安全和自动驾驶
七大主流AI企业包括OpenAI、谷歌等联合承诺:引入水印技术,并允许第三方审核AI内容
ChatGPT设计出的第一个机器人来了!【附人工智能行业预测】
全面拥抱大模型浪潮,ISC 2025打造全球首场AI数字安全峰会
AI室内设计软件流行,室内设计行业如何应对效率变革
布局智能物联新时代,中国移动“5G+物联网”亮相2025 MWC
羚客系统即将升级,推出全新的AI数字化工具
元宇宙技术带你穿梭“大运河”,江苏书展上的数字阅读馆吸睛小读者
普林斯顿大学推出 Infinigen AI 模型,生成真实自然环境 3D 场景
国内阅读行业首款对话式AI应用“阅爱聊”封闭内测
华为即将推出HarmonyOS 4,再度领先行业的AI技术
发布最新版本的 PICO OS 5.7.0:支持VR头盔录屏并跨平台分享至微信
选对AI智能写作软件,让创作游刃有余!
这效果能打几分?AI真人化《名侦探柯南》
微软面向AI初学者推出免费网络课程
探索人工智能在居家养老方面的应用
Vision Pro 太贵,苹果基于 iPhone 的 VR 头显专利曝光
创新科学家成功研发FAST激光靶标维护机器人
XREAL Beam 投屏盒子正式发布:支持“可悬停 AR 空间屏”
无需标注数据,「3D理解」进入多模态预训练时代!ULIP系列全面开源,刷新SOTA
美图秀秀发布7款AI产品:支持用户创作、商业创作
常见的五个人工智能误解
马斯克“揭秘”人工智能真面目
人工智能赋能无人驾驶:商业化进程再提速
小米创始人雷军将揭示小米AI在年度演讲中的最新进展
首届全国体育人工智能大会在首都体育学院召开
开创全新虚拟现实体验的Pimax Crystal VR头显
AI+游戏首度大范围公布实际应用成果,AI全面来临还有多远?
上海发布大模型政策 打造AI“模”都
学而思推出AI第一课:基于自研大模型的AIGC课程
杭州举办第19届亚运会,主题为「亚运元宇宙」的发布仪式举行
从数据中心到发电站:人工智能对能源使用的影响
1000万张照片训练AI模型 科学家找到水下定位新方法
苹果机器学习关键人物 Ali Farhadi 离职,回归 AI2 担任 CEO
独家视角:首次展示有人与无人协同打击的7000米高空察打一体无人机
Meta 开源 AI 语言模型 MusicGen,可将文本和旋律转化为完整乐曲
MetaGPT AI 模型开源:可模拟软件公司开发过程,生成高质量代码
如何用Transformer BEV克服自动驾驶的极端情况?
“直击”AI新世界,智能机器人再次“火出圈”了
Hugging Face发布了基于NASA卫星数据构建的AI地理空间基础模型
一文看懂基础模型的定义和工作原理
 当前位置:
当前位置:  上一篇:
上一篇: 返回列表
返回列表